AUTOSAR MCAL软件架构基本概念与基础软件服务解析
随着汽车电子电气架构向集中化、软件化方向发展,AUTOSAR(AUTomotive Open System ARchitecture,汽车开放系统架构)已成为行业主流标准。其中,MCAL(Microcontroller Abstraction Layer,微控制器抽象层)作为AUTOSAR分层架构的基石,为上层软件提供了与具体硬件解耦的标准化接口。本文将系统阐述AUTOSAR MCAL软件架构的基本概念及其提供的基础软件服务。
一、AUTOSAR MCAL基本概念
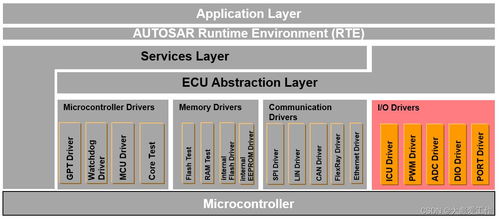
AUTOSAR采用经典的分层架构,自下而上分为:微控制器抽象层(MCAL)、ECU抽象层、服务层、运行时环境(RTE)和应用层。MCAL位于最底层,直接与微控制器硬件交互,其核心目标在于实现硬件无关性。
1. MCAL的定义与定位
MCAL是AUTOSAR基础软件(BSW)中直接访问微控制器内部外设(如ADC、DIO、PWM、CAN、SPI等)的软件模块集合。它封装了所有与特定微控制器相关的硬件特性,向上层提供标准化的API接口,从而使上层软件(如ECU抽象层、复杂驱动等)无需关心底层硬件的具体实现细节,实现软件的可移植性与可复用性。
2. MCAL的核心构成
MCAL由一系列针对不同微控制器外设的驱动模块组成,主要包括:
- 微控制器驱动(MCU Driver):负责初始化、时钟设置、电源模式管理、复位控制等核心微控制器功能。
- 端口驱动(PORT Driver):配置微控制器引脚的功能(如GPIO、复用功能)和电气属性。
- DIO驱动(Digital I/O Driver):提供数字输入/输出的读写控制。
- ADC驱动(Analog-to-Digital Converter Driver):控制模数转换器,执行模拟信号采样与转换。
- PWM驱动(Pulse Width Modulation Driver):生成脉宽调制信号。
- 通信驱动:如CAN驱动、LIN驱动、SPI驱动、以太网驱动等,负责对应通信协议的控制器初始化、数据收发管理。
- 存储器驱动(Memory Drivers):如内部/外部Flash驱动、EEPROM模拟驱动,提供存储器的读写、擦除等操作。
- 看门狗驱动(WDT Driver):管理硬件看门狗定时器,实现系统监控与故障恢复。
3. 硬件抽象与标准化接口
MCAL通过严格的API接口规范,将硬件操作抽象化。例如,无论底层是何种型号的CAN控制器,上层通过统一的Can_Write() API发送数据。这种设计使得更换微控制器型号时,只需替换或重新配置MCAL层,而无需修改上层应用软件,极大地降低了开发成本和复杂度。
二、MCAL提供的基础软件服务
MCAL不仅是硬件访问的抽象层,它还通过其驱动模块提供了一系列关键的基础软件服务,为整个ECU软件栈的稳定、可靠、高效运行奠定基础。
1. 硬件初始化与配置服务
这是MCAL最基础的服务。系统上电后,MCU Driver首先执行,设置微控制器的核心时钟、锁相环、电源模式等,为整个系统提供稳定的运行环境。其他驱动(如PORT、CAN)根据预配置(通常由工具链生成的配置代码)初始化各自对应的外设,使其进入就绪状态。此过程确保了硬件资源被正确、有序地启用。
- 实时I/O操作服务
- 数字与模拟I/O服务:DIO驱动提供高效、低延迟的数字信号读写;ADC驱动提供精确的模拟信号采样、转换与结果访问服务,支持单次、连续等多种转换模式。
- 定时与PWM信号生成服务:GPT(通用定时器)驱动和PWM驱动为需要精确定时、计时或生成特定占空比波形(如电机控制、灯光调光)的应用提供底层支持。
3. 通信总线服务
这是现代汽车ECU网络互联的核心。MCAL中的通信驱动(CAN、LIN、FlexRay、以太网等)提供了:
- 控制器初始化与配置:设置波特率、滤波、工作模式等。
- 数据链路层服务:帧的发送与接收、硬件缓冲区管理、中断处理。
- 错误检测与处理:总线错误状态监控与报告。
这些服务确保了ECU能够可靠地接入车载网络,进行数据交换。
4. 存储器管理服务
通过Flash驱动、EEPROM驱动(或EEPROM模拟驱动),MCAL提供了对非易失性存储器的安全访问服务,包括:
- 读写擦除操作:执行程序代码的更新、校准数据或故障码的存储。
- 擦写保护:防止误操作导致数据丢失。
- 数据一致性保障:在某些实现中提供防掉电机制。
- 系统安全与监控服务
- 看门狗服务:WDT Driver允许上层软件(通常是操作系统或看门狗管理器)定期“喂狗”。如果软件运行异常导致喂狗失败,看门狗硬件将触发系统复位,是保障功能安全(如ISO 26262)的关键机制。
- 诊断与错误报告:许多MCAL驱动具备诊断功能,能检测并上报硬件访问错误、超时、配置无效等故障,为上层诊断事件管理(Dem)模块提供原始信息。
6. 中断与DMA管理服务
虽然中断向量表通常由操作系统管理,但MCAL驱动(特别是通信和ADC驱动)负责在硬件中断发生时,执行必要的外设状态读取、数据搬运等最低层操作,并可能触发上层通知或任务激活。部分驱动也支持配合DMA(直接内存访问)实现高效数据传输,减轻CPU负载。
三、
AUTOSAR MCAL作为连接软件世界与硬件世界的桥梁,其核心价值在于通过标准化的抽象接口,实现了应用软件与硬件的解耦。它提供的一系列基础软件服务——从硬件初始化、实时I/O、通信、存储到系统监控——构成了ECU基础软件稳定运行的基石。理解MCAL的架构概念及其服务内容,是进行符合AUTOSAR标准的汽车嵌入式软件开发,尤其是底层软件配置、集成与验证工作的关键前提。随着汽车电子复杂度的提升和域控制器/中央计算平台的演进,MCAL的设计将更加注重性能优化、功能安全(FuSa)和信息安全(Cybersecurity)支持,但其作为硬件抽象核心的角色将始终不变。
如若转载,请注明出处:http://www.cect-smart.com/product/78.html
更新时间:2026-06-18 21:51:37